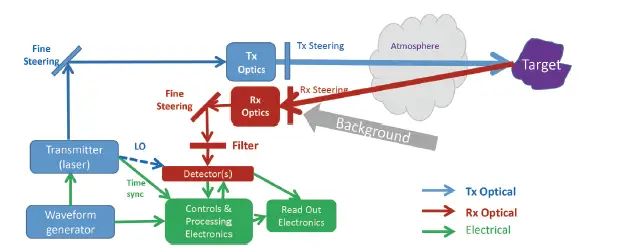
A LiDAR (Light Detection and Ranging) system is built around three fundamental components: the laser source, the receiver, and the optical apertures used for beam transmission and pointing. Together, these elements determine the system’s range, resolution, accuracy, and overall performance.
1. Laser Sources
The laser source defines the emitted wavelength, pulse characteristics, and achievable measurement precision. Common laser types used in LiDAR systems include:
Diode Lasers
Diode lasers are compact, efficient, and cost-effective. However, they lack internal energy storage, which prevents Q-switching operation. As a result, they typically produce broader linewidths and larger beam divergence. These characteristics make diode lasers suitable for applications where high pulse energy or near-diffraction-limited beams are not required.Diode-Pumped Solid-State Lasers (DPSSLs)
Solid-state lasers offer narrower linewidths and lower beam divergence, often approaching the diffraction limit. They can be Q-switched to generate high peak power pulses, enabling long-range and high-resolution LiDAR measurements. These lasers are commonly used in precision mapping, airborne LiDAR, and scientific applications.Fiber Lasers
Fiber lasers provide excellent electrical-to-optical efficiency and high beam quality. Their relatively small gain area limits achievable pulse energy, but they are well suited for high-duty-cycle or continuous-wave LiDAR systems, especially in coherent detection architectures.
2. Receivers
The receiver converts reflected laser signals into electrical signals for range, velocity, and intensity analysis. LiDAR receivers can be broadly categorized as single-detector or detector-array-based systems.
Single Detectors vs. Detector Arrays
Early LiDAR systems relied on single detectors, requiring mechanical scanning to build an image. Modern systems increasingly use high-bandwidth detector arrays, enabling simultaneous range measurements across multiple pixels. This significantly improves imaging speed, spatial resolution, and system robustness.Coherent vs. Direct Detection
In coherent LiDAR, a local oscillator (LO) is mixed with the received signal to enhance sensitivity and improve signal-to-noise ratio (SNR). This approach is particularly effective for velocity (Doppler) measurements.
Direct detection systems may rely on optical or electronic amplification to improve SNR when coherent detection is not used.Detector Technologies
Linear-Mode Avalanche Photodiodes (LMAPDs) amplify the photo-generated signal by producing multiple electrons per detected photon, improving sensitivity while preserving signal proportionality.
Geiger-Mode APDs (GmAPDs) operate in a binary fashion, producing a full output pulse when one or more photons are detected, making them highly sensitive for low-light or photon-counting applications.
3. Apertures and Beam Pointing
The aperture system governs how the LiDAR transmits and collects light and directly impacts angular resolution and field of view.
Shared vs. Separate Apertures
Some LiDAR designs use a common aperture for both transmission and reception, while others employ separate optical paths. The choice depends on system complexity, power handling, and isolation requirements.Mechanical Beam Steering
Traditional LiDAR systems often use mechanically steered mirrors or gimbals to scan the beam across a scene. While effective, these systems introduce moving parts that can limit speed and long-term reliability.Non-Mechanical Beam Steering
Emerging LiDAR architectures use optical phased arrays (OPAs) to steer beams electronically by controlling the phase of emitted light. Similar to microwave phased-array radars, this approach enables fast, precise beam steering without moving components, offering improved robustness and scalability.
Summary
The laser source, receiver, and aperture system form the technological backbone of any LiDAR system. By carefully selecting and integrating these components, LiDAR systems can achieve precise measurements of distance, angle, and velocity, supporting applications ranging from autonomous vehicles and airborne mapping to industrial inspection and scientific sensing.