
LiDAR detection modes define how returned optical signals are converted into usable information such as range, velocity, and reflectivity. The choice of detection architecture has a major impact on system sensitivity, noise performance, and the type of data that can be extracted.
There are two primary LiDAR detection modes: direct detection and coherent detection.
Direct Detection LiDAR
In direct detection, the returned laser light is incident directly on an optical detector—such as a photodiode or avalanche photodiode—without mixing with a reference signal.
Operating Principle
The detector response is proportional to the optical intensity, which itself scales with the square of the electric field magnitude:
I ∝ |E| ^2
This makes direct detection well suited for:
- High-return-signal scenarios
- Pulsed time-of-flight (ToF) LiDAR
- Simpler system architectures
Characteristics
- Straightforward implementation
- No requirement for phase or frequency stability
- Limited sensitivity at long range
- Cannot directly measure Doppler frequency or phase
Direct detection is widely used in flash LiDAR and many scanning ToF LiDAR systems, where range is obtained by measuring the pulse round-trip time.
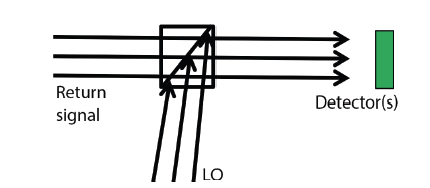
Coherent Detection LiDAR
In coherent detection, the returned signal is optically mixed with a reference beam derived from the same laser source, known as the local oscillator (LO). The detector measures the interference (beat signal) between the two fields rather than their absolute intensity.
Beat Signal Formation
The detected intensity includes a cross-term proportional to both fields:
I = 2EsigELOcos(ωsig−ωLO)
where:
- is the returned signal field
- is the local oscillator field
- ωsig and ωLO are their respective angular frequencies
This beat term enables detection of:
- Phase
- Frequency (Doppler shift)
- Amplitude
Because the LO can be much stronger than the return signal, coherent detection provides significantly higher sensitivity than direct detection.
Temporal Heterodyne and Homodyne Detection
Temporal Heterodyne Detection
In temporal heterodyne LiDAR, the LO frequency is intentionally offset from the transmitted laser frequency. This frequency shift translates Doppler information into a measurable intermediate frequency (IF), enabling:
- Precise velocity measurement
- Improved noise rejection
- Separation of signal from low-frequency noise
Homodyne Detection
When the LO frequency is not offset, the system operates in homodyne mode. This configuration is simpler but more sensitive to phase noise and low-frequency interference.
Spatial Heterodyne Detection (Digital Holography)
In spatial heterodyne detection, also known as digital holography, the LO and return signal are intentionally misaligned by a small angle on the detector.
Key Features
- Produces spatial interference fringes across the detector
- Requires a detector array rather than a single detector
- Encodes phase and amplitude in the fringe pattern
The spatial frequency of the fringes is proportional to the angular tilt between the LO and signal beams. If the tilt is too large, the fringes become too dense to be resolved by the detector, resulting in loss of information.
This approach enables:
- Wavefront reconstruction
- Angle-of-arrival estimation
- High-resolution imaging with phase sensitivity

Comparison of Detection Modes
| Feature | Direct Detection | Coherent Detection |
|---|---|---|
| Sensitivity | Moderate | Very high |
| Phase Measurement | No | Yes |
| Doppler / Velocity | Limited | Direct |
| System Complexity | Low | High |
| Typical Applications | ToF, Flash LiDAR | FMCW, Doppler LiDAR |
Summary
Direct and coherent detection represent two fundamentally different approaches to LiDAR signal processing. Direct detection offers simplicity and robustness for intensity-based ranging, while coherent detection enables superior sensitivity and direct measurement of phase and velocity through optical mixing with a local oscillator.
Advanced techniques such as temporal heterodyne, homodyne, and spatial heterodyne detection expand LiDAR capabilities, making coherent architectures essential for high-performance applications such as long-range sensing, Doppler imaging, and FMCW LiDAR.